Following the introduction of the turbine model object in version 10.3 we have now produced a report which details the validation performed on the turbine against documented industry studies.
The validation study considers the National Renewable Energy Laboratory (NREL) offshore 5-MW baseline wind turbine, which is
recognised as an industry-standard reference turbine system.
Two separate turbine systems have been modelled and subjected to detailed analysis in OrcaFlex:
- A land-based wind turbine system.
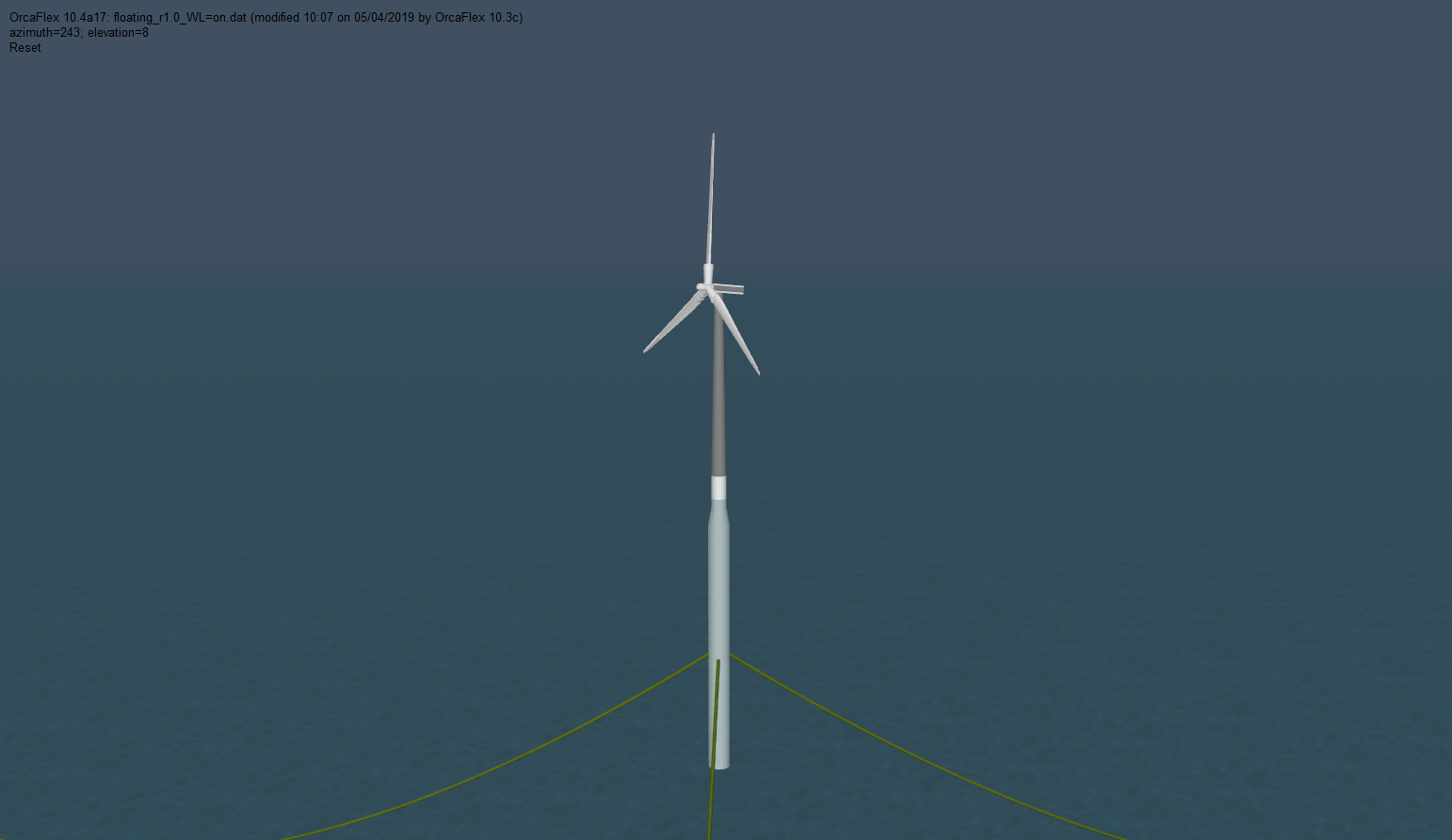
- A floating wind turbine system – based on the OC3 Hywind system.
Analysis of the land-based scenario was considered to facilitate basic validation of the turbine response determined via OrcaFlex. Detailed analysis of the OC3 Hywind system was then considered to help validate the behaviour of a fully-coupled floating wind turbine system in OrcaFlex.
Results were compared to those from other wind turbine simulation tools; namely FAST, MSC.ADAMS, Bladed and HAWC2.
Overall, OrcaFlex has been shown to accurately capture the aerodynamic and hydrodynamic loading on the considered turbine systems. Close agreement was generally observed between the OrcaFlex results and those available from the other simulation tools – particularly with respect to the calculated turbine rotor response.
The full report is available alongside previously published OrcaFlex validation cases on the validation page here.