
|
Importing hydrodynamic data: OrcaWave |
|
|
Importing hydrodynamic data: OrcaWave |
OrcaWave outputs its results to a binary file with an .owr extension, from which OrcaFlex can import the hydrodynamic data. Unlike other hydrodynamic data files (e.g. AQWA and WAMIT files), .owr files can be opened directly in OrcaFlex (e.g. by using the file menu). This is in addition to being imported into existing vessel type objects in the same way that other hydrodynamic data formats are imported.
It is possible to open an .owr file directly in OrcaFlex via the file menu. This process is fully automatic and is the easiest way to import OrcaWave results.
When OrcaFlex opens an .owr file, it detects which bodies are in the OrcaWave model and creates appropriate vessels and vessel types to represent these bodies. Opening an .owr file in OrcaFlex also sets the following data from the corresponding information in the OrcaWave model:
The standard import process is then carried out automatically to populate the hydrodynamic data for the newly created vessel types. All available data will be imported during this process and any decisions (e.g. which load RAOs to import if both Haskind and diffraction load RAOs are present – see below) will be resolved according to the preferences in the OrcaWave model.
Data from an .owr file can be imported into a model's preexisting vessel types. This process is very similar to how hydrodynamic data is imported from other sources (e.g. AQWA, WAMIT); however, there are some aspects that are particular to OrcaWave. For example, the import of the mesh drawing, symmetry and vessel type length (classed as part of the structure data on the import form) are exclusive to OrcaWave files.
For some types of data (load RAOs, Newman QTFs, full QTFs), OrcaWave may offer results from various different calculation methods. The requested data page of the import vessel data form allows you to choose between the methods that are available in the .owr file you have selected, as illustrated in the following figure:
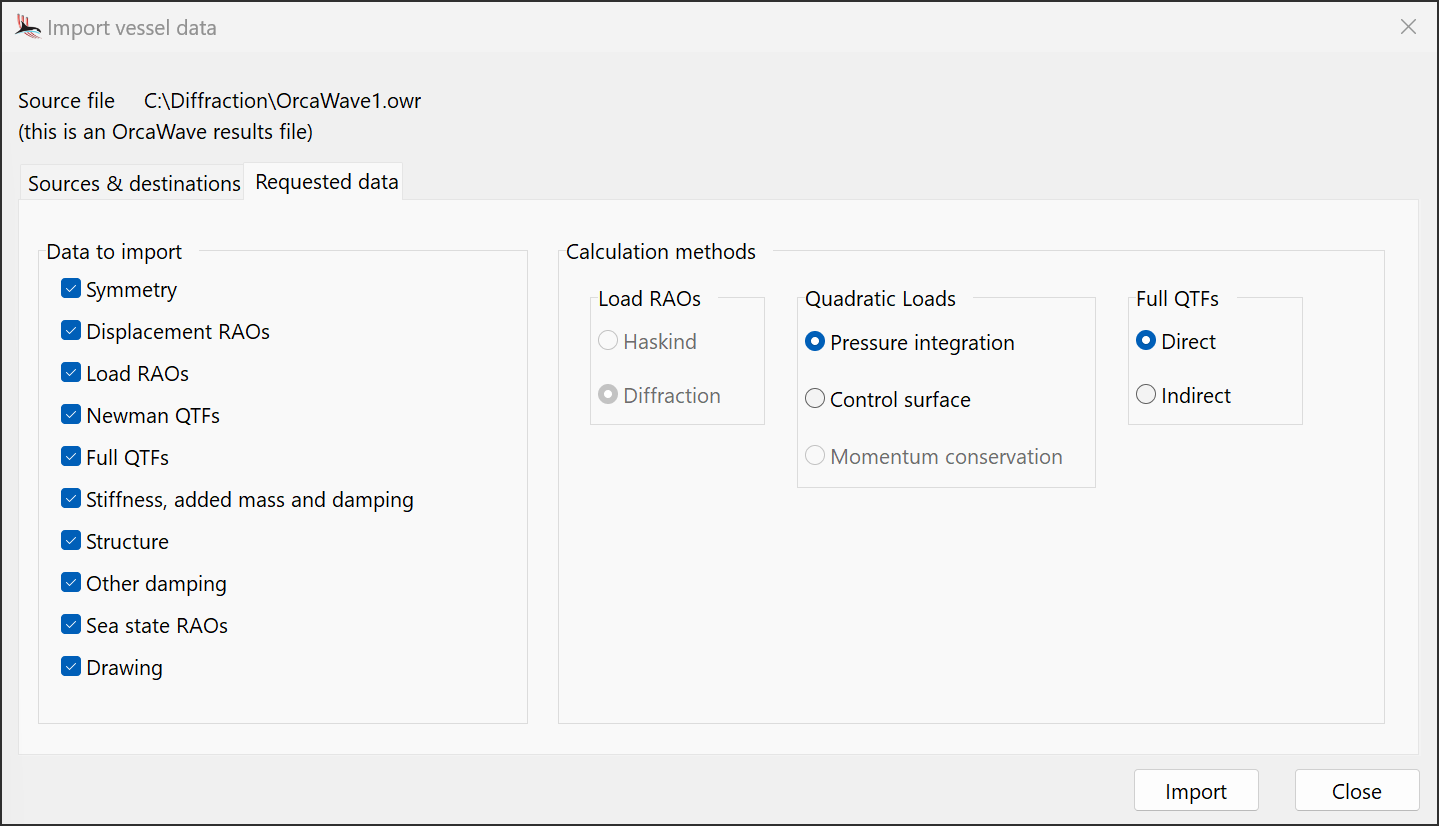
| Figure: | OrcaWave calculation methods |
In this example, a choice may be made between the different calculation methods employed by OrcaWave for the Newman QTFs and the full QTFs. Methods that are not included in the results, such Haskind load RAOs, are disabled and cannot be selected.
| Note: | When opening an .owr file directly in OrcaFlex, the calculation methods are chosen automatically according to the preferences set in the OrcaWave model (assuming that more than one type of data is available). These are the preferred load RAO calculation method, the preferred quadratic load calculation method and the preferred QTF calculation method. |
You must ensure that the vessel type centre of mass coordinates are set appropriately in OrcaFlex before importing OrcaWave data into an existing vessel type. Almost all OrcaWave data (with momentum-conservation Newman QTFs being an exception) have their reference origin at the OrcaWave body origin. OrcaFlex deduces the position of this origin, relative to OrcaFlex's vessel origin, from the difference between the centre of mass coordinates in the .owr file (which are relative to the OrcaWave body origin) and the centre of mass coordinates of the OrcaFlex vessel type (which are relative to the OrcaFlex vessel type origin). This is why the OrcaFlex vessel centre of mass must be set before import.
In an OrcaWave analysis where the hull model represents a vessel at non-zero heel and trim, those angles can be read directly from the .owr file and set as the datum heel and trim for the OrcaFlex vessel type.
| Note: | This differs from WAMIT import, which requires the user to manually enter the datum heel and trim before import. This is because the corresponding data cannot be read from the WAMIT .out file. |
OrcaWave uses a horizontal reference frame, with its origin at the mean water level, for reporting its output; however, some quantities that are imported into OrcaFlex need to be expressed using the OrcaFlex vessel axes. These are reference origins, phase origins, the rotational inertia matrix and the centre of buoyancy. The datum rotations are used to transform OrcaWave output so that it is correctly expressed using the OrcaFlex vessel axes.
OrcaFlex sets the vessel type's RAO origins, QTF origin, and added mass and damping origin to be the coordinates of the OrcaWave body origin relative to the OrcaFlex vessel origin, with respect to OrcaFlex vessel axes. In the simple case where the OrcaFlex vessel origin coincides with the OrcaWave vessel origin, the coordinates of the centres of mass in OrcaWave and OrcaFlex will also coincide and the reference origins will all be zero.
In OrcaWave, the phase origin is at the global origin, so the OrcaFlex RAO phase origins are represented by the coordinates of the OrcaWave global origin relative to the OrcaFlex vessel origin.
| Warning: | The inertia matrix is defined differently between OrcaWave and OrcaFlex: in OrcaWave, it is defined about the body origin and with respect to the horizontal body axes; in OrcaFlex, it is defined about the centre of mass and with respect to the vessel/mesh axes. The components of the inertia matrix can therefore differ between the two programs because the necessary reorientation and shift of origin will have been performed by the import process. |
There are some significant differences between momentum conservation and the other quadratic load methods:
Panel pressure results cannot be imported from an OrcaWave .owr file because there is no corresponding data item to populate in an OrcaFlex vessel type object. Nevertheless, time domain panel pressure results can be obtained for an OrcaFlex vessel if an .owr file is available. These results can be obtained following a time domain analysis in a post-processing calculation. See vessel results for details of the process.