
|
Importing hydrodynamic data: WAMIT |
|
|
Importing hydrodynamic data: WAMIT |
WAMIT outputs its results to a text file with an .out extension and OrcaFlex can import data from such a file. The data are almost all non-dimensional, the main exceptions to this being acceleration due to gravity $g$, and WAMIT's length scale $L$, used to non-dimensionalise the data.
For some types of data (load RAOs, Newman QTFs, full QTFs) WAMIT may offer results from various different calculation methods. The requested data page of the import vessel data form allows you to choose between the methods that are available in the .out file you have selected, as illustrated in the following figure:
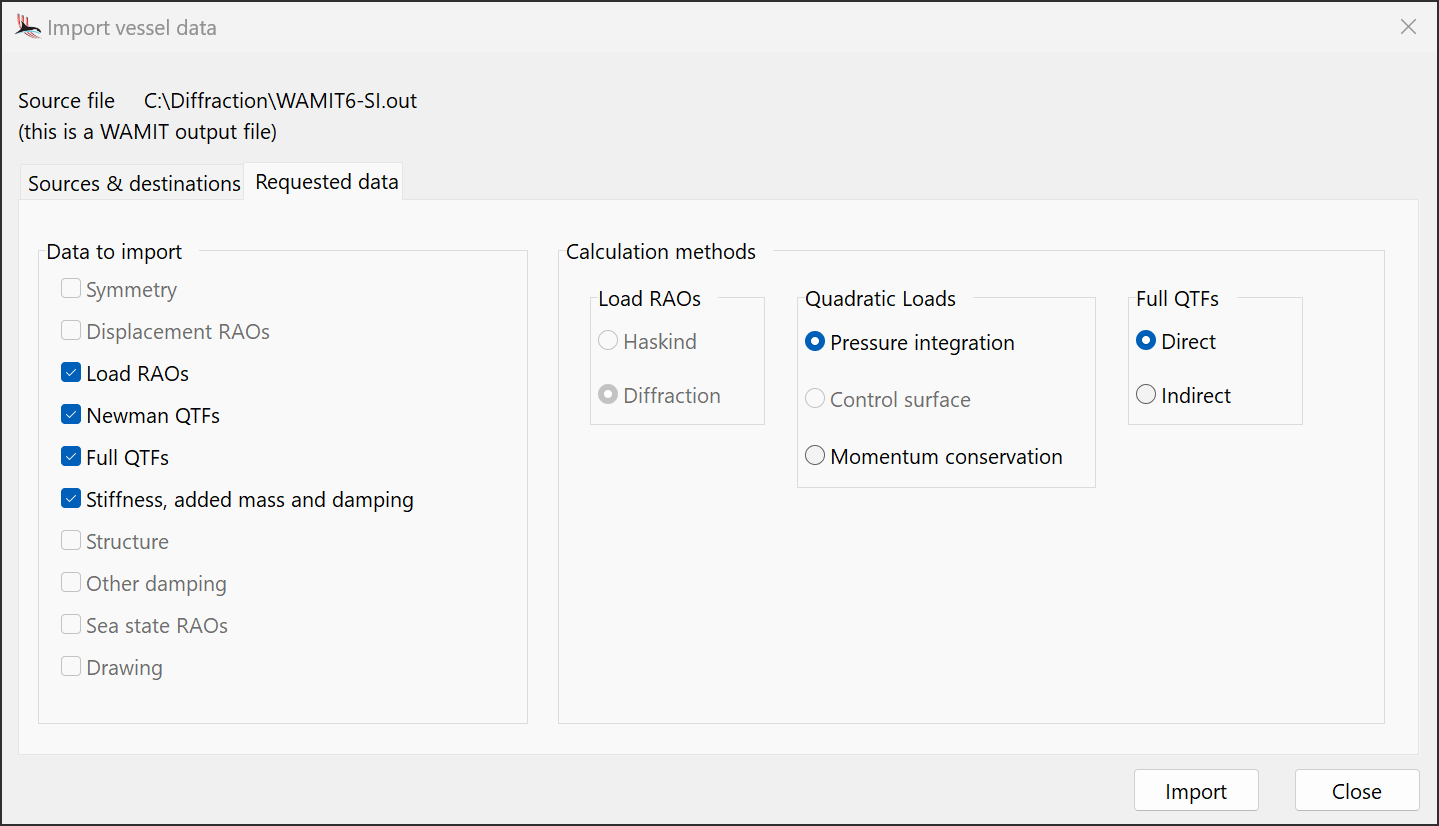
| Figure: | WAMIT calculation methods |
In this example, a choice may be made between the different calculation methods employed by WAMIT for the Newman QTFs and the full QTFs. But in this particular file the load RAOs results are present for the diffraction method only, so the Haskind option is disabled and may not be selected in this case. Similarly, the control surface option is not available for the Newman QTFs.
The length unit in use in the file will be determined, if possible, from the value of $g$ and the knowledge that the unit of time is the second. If this is successful, then OrcaFlex will convert the data from non-dimensional to the units prevailing in the OrcaFlex model, using WAMIT's length scale $L$ (converted to the length unit of the OrcaFlex model) and the current OrcaFlex values of $g$ (acceleration due to gravity) and $\rho$ (nominal water density), using the scaling factors defined in the WAMIT user manual. If the length unit cannot be determined then the raw data will be imported from the file unscaled and a warning will be issued.

| Figure: | Position vectors used for reference during import of hydrodynamic data from WAMIT |
You must ensure that the vessel type centre of mass coordinates are set appropriately in OrcaFlex before importing WAMIT data.
Almost all of the WAMIT data (with momentum-conservation QTFs being the sole exception) have their reference origin at WAMIT's vessel origin. OrcaFlex deduces the position of this WAMIT vessel origin, relative to OrcaFlex's vessel origin, from the difference between the centre of mass coordinates in the .out file (which are relative to the WAMIT vessel origin) and the centre of mass coordinates of the OrcaFlex vessel type (which are relative to the OrcaFlex vessel type origin). This is why the OrcaFlex vessel centre of mass must be set before import.
In a WAMIT analysis where the hull model represents a vessel at non-zero heel and trim, those angles should be entered as the datum rotations for the OrcaFlex vessel type. Again, and for similar reasons, these values must be set before importing WAMIT data.
WAMIT uses a horizontal reference frame for reporting its output, but some quantities that are imported into OrcaFlex need to be expressed using the OrcaFlex vessel axes. These are reference origins, phase origins, the rotational inertia matrix and the centre of buoyancy. Providing datum rotations when necessary will allow the import process to transform WAMIT output so that it is correctly expressed using the OrcaFlex vessel axes.
OrcaFlex sets the vessel type's RAO origins, QTF origin, and added mass and damping origin to be the coordinates of the WAMIT reference origin relative to the OrcaFlex vessel origin, with respect to OrcaFlex vessel axes. So in the simple case where the OrcaFlex vessel origin coincides with the WAMIT vessel origin, then the coordinates of the centres of mass in WAMIT and OrcaFlex will also coincide and the reference origins will all be zero.
In WAMIT, the phase origin is at the global origin, so the OrcaFlex RAO phase origins are represented by the coordinates of the WAMIT global origin relative to the OrcaFlex vessel origin. OrcaFlex determines this by (i) expressing the WAMIT global origin relative to the WAMIT vessel origin (in body-fixed axes), using the values of XBODY, YBODY, ZBODY and PHIBODY in the WAMIT output file, (ii) adding the offset from WAMIT vessel origin to OrcaFlex vessel origin, which is found using the difference between the centres of mass coordinates specified in WAMIT and in OrcaFlex, and (iii) using the vessel type datum rotations to express the position of the WAMIT global origin relative to the OrcaFlex vessel origin using OrcaFlex vessel axes.
| Notes: | In some cases, WAMIT does not output the horizontal position of the centre of mass. If so, then OrcaFlex will warn you of this, and you will need to set these reference origins yourself. |
| WAMIT includes the capability to analyze generalised modes of body motion, which extend beyond the normal six degrees of rigid-body translation and rotation to allow e.g. structural deformations and motions of hinged bodies. OrcaFlex is not able to import such data: your WAMIT model must contain only rigid bodies. |
Displacement RAOs are imported in a straightforward way. They are re-dimensionalised by multiplying by the factor $L^k$, where $k=0$ for $i{=}1,2,3$ and $k=-1$ for $i{=}4,5,6$.
It is our understanding that the displacement RAO rotations reported by WAMIT should be interpreted as yaw-first, roll-last rotations about original axes.
WAMIT may calculate load RAOs in one of two ways, and data from either or both methods (labelled "Haskind" and "diffraction") may be present in the file. If both are given, you may choose either method and OrcaFlex will import the data for that method only. The re-dimensionalising factor for load RAOs is $\rho\,g\,L^k$, where $k = 2$ for $i{=}1,2,3$ and $k = 3$ for $i{=}4,5,6$.
The RAO directions in OrcaFlex are relative to the vessel $x$-axis direction, and are determined by subtracting the value of PHIBODY in the WAMIT input file (the vessel heading at rest) from each of the values of wave heading, which are given in WAMIT with respect to global axes.
Wave drift QTFs are re-dimensionalised with the factor $\rho\,g\,L^k$, where $k = 1$ for $i{=}1,2,3$ and $k = 2$ for $i{=}4,5,6$. Directions are adjusted in the same way as for RAOs.
WAMIT may calculate Newman QTFs in a number of different ways: Pressure integration, control surface and momentum conservation. As with load RAOs, if data from more than one of the methods are present, then you will be given the choice of which to import.
Similarly full QTFs (if included) can be calculated by WAMIT in two different ways: a direct and an indirect method. If data from both of these methods are present in the .out file, then you will be prompted to choose one of them; if both difference frequency and sum frequency QTFs are present, you will have to make this choice for each.
| Notes: | WAMIT outputs Newman QTFs for pairs of wave headings. OrcaFlex allows only uni-directional Newman QTFs, so imports only the data for which the two headings coincide. This restriction does not apply to full QTFs. |
| WAMIT results for Newman QTFs obtained using the momentum conservation calculation method are referred to WAMIT's global origin. OrcaFlex takes account of this during the import and sets the QTF origin accordingly. | |
| WAMIT results for full QTFs are written in an incomplete form by versions of WAMIT earlier than version 6: the equal-period values are not written to the file. OrcaFlex cannot therefore import a complete set of full QTF data from these files. | |
| WAMIT results for full QTFs are sometimes limited to a subset of periods and/or headings. This is usually because physically-irrelevant QTFs have been excluded in order to reduce the WAMIT run time. Any QTFs that are required by OrcaFlex (for a complete interpolation grid) and were excluded from the WAMIT calculation will be populated with zero values. |
WAMIT outputs added mass and damping as a list of $(i,j)$ components. WAMIT outputs components for the whole matrix, but, on theoretical grounds (at least for zero forward speed), this matrix should be symmetric. OrcaFlex enforces this symmetry, so imports only the upper right triangle of each matrix and sets the lower left triangle values to match. You will receive a warning if any of these matrices, in the imported file, are significantly non-symmetric. Components for which an $(i,j)$ value is not given are assumed to be zero.
The non-dimensional WAMIT values for added mass $(a)$ and damping $(b)$ are scaled to dimensional values ($A$ and $B$ respectively) according to the formulae \begin{aligned} A_{ij} &= \rho L^k a_{ij} \\ B_{ij} &= \rho L^k \omega\, b_{ij} \end{aligned} where
$k = 3$ for $i,j{=}1,2,3$
$k = 4$ for $i{=}1,2,3,\ j{=}4,5,6$ or $i{=}4,5,6,\ j{=}1,2,3$
$k = 5$ for $i,j{=}4,5,6$
$\omega$ is the frequency in rad/s.
The heave, roll and pitch components of the hydrostatic stiffness matrix are imported.
The reference origin datum position is not reported by WAMIT, so you should enter this value yourself.
The displaced volume is taken as the median of the three estimates given by WAMIT. Centre of buoyancy is imported if it is given in the WAMIT file.
Mass and moments of inertia may be imported if available. Depending on the options chosen at the time of the WAMIT analysis, these may take one of two forms in the WAMIT output file:
Having determined the full $6{\times}6$ inertia matrix by one of these two means, OrcaFlex will then transform this matrix according to the difference (if any) between the WAMIT and OrcaFlex vessel origins, rotate it from the diffraction frame to vessel axes if the datum rotations are non-zero, and extract the mass and moments of inertia from the transformed matrix.
WAMIT sea state RAO data take the form of absolute values of sea surface elevation, pressure and fluid velocity. OrcaFlex requires velocity potential disturbance RAOs that are measured relative to the undisturbed wave, so converts the WAMIT data into disturbance RAOs of the required form as part of the import process.
If you import sea state RAOs for a multibody group of vessels, then OrcaFlex will import sea state RAOs for each of the vessel types in the group.
WAMIT writes interacting multibody added mass and damping data to a separate file, with the same name as the .out file but the suffix '.1'. If this file is present in the same folder as the .out file, OrcaFlex will import the data it contains and re-dimensionalise them in the same way as the independent added mass and damping (described above), using the scaling factors and units as determined from the .out file.
WAMIT also outputs interacting hydrostatic stiffness matrices, but OrcaFlex does not allow for this interaction. The hydrostatic stiffness data imported are those in the .out file which do not include interaction effects.
| Notes: | Waves may be referred to by their period or by angular frequency in the .1 file. This contrasts with the .out file, which always refers to waves by period regardless of the WAMIT run options. OrcaFlex will try to determine this wave referral convention used in the .1 file by reading the summary of the POTEN run presented in the .out file. |
| WAMIT results for Newman QTFs obtained using the momentum conservation calculation method are for the ensemble slow drift motion of a multibody group as a whole. If the group has only a single body (i.e. the analysis is for a single vessel), OrcaFlex can import these data, but for a multibody WAMIT analysis OrcaFlex is unable to import these collective momentum conservation QTF data. |